First chassis design
Second chassis design

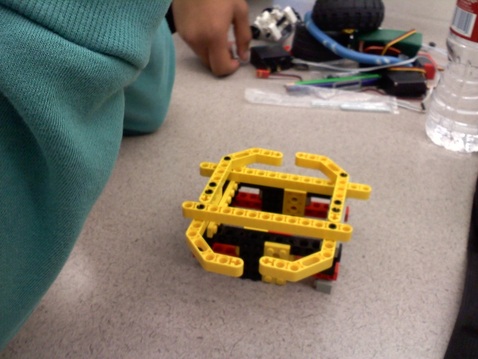
sumobot final
The sumobot project was a lengthy project where we learned about programming in C, building a stable chassis, using sensors, and how to work well in teams. We first build a prototype bot out of Legos where we learned how to build a stable chassis out of Legos. Then we learned how to attach and test motor servos, and digital/analog sensors. Then our group learned how to program in a computer language called C. once we learned the basics we had two weeks to build a final robot and design our final programs. Each robot had three sections to its program the search, the offense, and the defense.
search
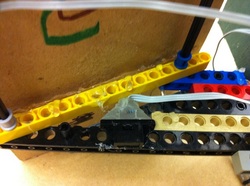
The search strategy for our robot was that it would drive around the round ring the served as the playing field and use the two touch sensors installed on either end to detect robots in front, or behind. This picture, is a short range inf-red sensor. we used this so that our robot could see where the edge of the board is and not fall off. When our robot drives over the edge the sensor picks up the change in light and distance so it tells the robot/program to back up, turn around, and drive the other direction.
attack/offense

The attack strategy that we decided on was to search the playing field for enemy robots and once a robot would touch the touch sensor in the front our robot would increase it's speed in order to try and push the robot off the edge. The touch sensor is small but, we used a longer piece of lego to act as a bumper so it can sense a larger area.
defense
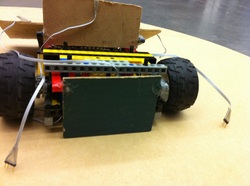
the defense strategy the our robot uses is simple program, there is a touch sensor located on the back under the bumper pallet. when a robot pushes this or comes in contact with it, our robot quickly turns and drives away with increased speed.
